
Tag: ARTAS
Restoration Robotics 跟 植髮機器人ARTAS 五年來的回顧

想做FUE,可是想到要剃一整片頭髮………..


FUE 不方便的地方


植髮機器人=FUE?


22屆國際植髮學會ISHRS Shangri-La Hotel Kuala Lumpur 發表植髮機器人ARTAS使用心得

人類閃邊,ARTAS機器人來扎洞啦!

最迅猛的禿頭終結者:植髮機器人ARTAS 一天取6480株毛囊 !


人類唯一能跟植髮機器人對抗的武器: Dr. John Cole 發明的 non-shaving FUE

跟醫師一起共創植髪新紀元的機器人ARTAS part III : 機器人自己的困境

植髮機器人ARTAS 明年2014的新進展之二:微創細縫準備種頭髮
植髮機器人 ARTAS 再進化

手術機器人的分類
簡單說,三種:遙控,輔助,全自動
Teleoperated systems 醫師遠端操控機器手臂
如達文西手臂,將醫師的手指動作傳達到人體內的機器手臂以進行精密的手術。
Interactive systems 輔助互動型,機器人協助醫師將手術做得更精密
像是大多數的骨科機器人MAKO , ROBODOC,配合3D影像以及電腦的分析,讓醫師可以選擇最理想的人工關節,並得以做精細的切除手術,減少不必要的破壞,及術後併發症。
Acitve systems 機器人自己動手,醫師在一旁監督
只要輸入病人的影像資料,醫師修正某些參數之後,機器人就能自己動手術或治療病人。像是Accuray 的Cyberknife 及Restorations Robotic 的植髮機器人ARTAS。發明ARTAS的Dr. Mohan Bodduluri曾很自豪地說ARTAS是全世界唯一能自己動手治療病人的機器人,雖然未臻完美,但相信在不久的將來,整個植髮手術可以被全部自動化的時候,會是另一番光景。
照片是外科醫師用達文西手臂摺紙飛機練習使用技巧。
為什麼植髮要用機器人ARTAS?

玩Game時你如果夠本會選哪一種武器達到目的?刀,槍,機關槍,戰車,還是配備電腦輔助射擊的戰鬥機?
或者換個方式來說好了,如果要做長途旅行,你會選徒步,腳踏車,摩托車,還是開車?當然每個人有自己的偏好,及目的,選擇的方式因人而異。不過一般而言,都會選擇比較舒適的方式來達到目的地,尤其如果路不熟相信很多人都會選配有導航系統的汽車。
不只是玩電動或開車旅行。外科手術在十幾年前也已經開始進入電腦化機器人時代,Intuitive Surgical 的達文西手臂讓醫師在前列腺及腹部手術不但可以達到微創的目的又可以讓醫師有更理想及穩定的手術作業環境。
Hansen公司出品的SENSEI則是醫療導管機器人。透過3D影像及機器手臂的幫助醫師可以更精準地將導管送到心臟治療心律不整的問題。
另外,骨科醫師在十幾年前也已經使用電腦導航系統來幫助醫師在關節置換手術前可以先知道該處理的範圍及深度並挑出適合病人的人工關節,手術中輔助醫師控制精確度,達到最佳的治療效果,也因為電腦的精準控制減少對骨頭及骨髓的破壞,也降低術中出血及術後中風,心肌梗塞的風險。
在2000年之前,大多數的機器人都是在骨科,一般外科腹腔,骨盆腔,或是胸腔心臟治療等範疇內發展。皮膚因為肉眼看得到,一般不太會想到用機器人在皮膚上動刀。
一直到2003年休士頓的神經外科醫師Dr. Philip Gildenburg 聽到植髮手術繁瑣重複的步驟,聯想到可以使用他自己最擅長的定位手術以及機器手臂來幫助醫師植髮,這才開啓了機器人在皮膚外科手術的第一扇窗。
機器人到底有哪些好處,讓植髮醫師感到驚艷?(截至2013年3月底為止,美國20台,英國1台,日本2台,韓國3台,馬來西亞1台,總共27台)
第一,用兩階段鑽洞取毛囊,不傷毫髮
一般用手動或電動FUE鑽孔器取毛囊時,醫師們多習慣直接用旋轉的方式直接地鑽取毛囊。
機器人藉由機器手臂之便,同時裝有兩種探頭,內尖針,外鈍鑚。先用內徑1.1mm的尖針刺入表皮內,再用旋轉的鈍鑽將深層的毛囊跟周圍結締組織剝離開。
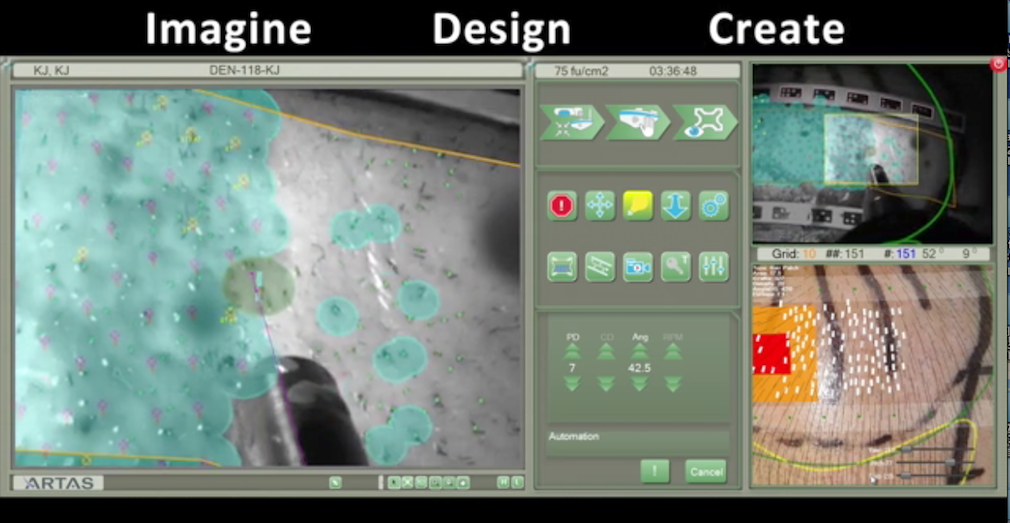
說來輕鬆,但是要不傷及毛囊,確保毛囊完整性卻是還要靠電腦軟體控制機器手臂才有辦法辦得到。在過程當中,尖針的穿刺深度,角度,鈍鑽的轉速,深度這四個參數關係著取毛囊的成敗。
電腦藉由四台CCD(Charge Coupled Device)的鏡頭攝影可以確實掌握毛囊的方向,角度,分佈,以及密度這些三度空間的詳細訊息,另外,在每次取毛囊的同時,電腦還會根據瞬間影像,來判斷進入表皮的深度是否適當,即時更正下一次取毛囊的四個重要參數,醫師如果不滿意結果,還可以根據判斷來做適度的修正。
第二,疤痕在1mm以下,水過無痕
可以有這樣的結果都是因為有了Restoration Robotics 替ARTAS想了一個天才主意,叫做tensioner(頭皮緊繃器)。
tensioner(頭皮緊繃器)有幾個作用:
一是緊繃器上有fiducial mark (座標記號),讓電腦在判斷方位跟方向上有個基準點可循。
二是緊繃頭皮,讓頭皮可以均勻地拉緊成一平整的表面,方便後續的手術進行。就像在皮膚上動刀一樣,要把皮膚拉緊,畫出來的刀口才會漂亮。
三是將皮膚拉平,方便電腦判讀。一般的皮膚多少有些弧度,這樣要讓電腦判斷毛囊的角度方向都有相當的困難。而緊繃器正好可以將皮膚拉成筆直的平面,減少誤判。
最後一個也最重要,先將皮膚表面積擴大,再用比較大的鑽頭取得毛囊,之後皮膚恢復原來張力,傷口也會跟著縮小,不至於留下明顯疤痕。
取毛囊尖針的內徑雖然只有1.14mm , 外圍的鈍鑽外徑卻有1.75mm,所以有些醫師(像是我在其他文章提到的Dr. Umar )就因此認為ARTAS會造成比較明顯的疤痕。
但是託了上述的天才發明,頭皮緊繃器,可以將頭皮往外拉開近兩倍的距離,因此機器人可以用比較大的鑽頭取得更完整的毛囊及周圍組織,卻不會加大傷口,還是可以讓傷口美麗無痕。
第三,取毛囊的密度用電腦亂數排列,毫無破綻
一般人可能會覺得不是機器人做的,會比較規則容易露餡嗎?錯了,如果程式設計妥當,反而不容易被看穿。如果是人為的操作,一方面要專心取毛囊,另一方面又要將取毛囊的密度做妥當的安排, 一心多用,有時會容易有失誤。
反而電腦程式控制好一定的距離,不要取太近的毛囊,再加上用亂數去分配取毛囊的密度,反而可以將疤痕隱藏得更好。
第四,穩定地取出每一株毛囊,堅持品質
如果是醫師心自動動手執行FUE手術取兩千株毛囊,或許前面300株醫師狀況好的時候可以取得容易些,越到後面重複步驟不斷進行,醫師越來越累的情況下,或許最後的速度或品質也會不盡理想。
機器人不只不會累,還能在清楚的影像底下進行手術,而不是靠頭戴式外科放大鏡來執行手術。君不見,植髮手術從一開始的用肉眼分頭髮,進化到用外科手術放大鏡,毛囊單位的立體顯微鏡分毛囊,一直到用電視銀幕放大顯像。這一切的進步都把手術推向更人性化的品質,不僅是讓醫護人員有更佳的工作環境,也讓病人能有更優的結果。
紐約的Dr. Bernstein 也說醫師使用機器人植髮,不需要再去適應放大鏡裡的影像及距離手感,可以直接在銀幕上清楚地觀察到每一株毛囊的採取過程,如果不對勁還能立刻做修正。
一旦找到了取毛囊的完美方程式,接下來機器人就能堅持一定的品質完成工作,即便是取了兩千株,第一株到最後2000株的品質都會是最理想的狀態。相信這也是植髮手術的終極目標。
當然不敢說,機器人一定贏過所有醫師的人工作業,美國有好幾位主攻FUE的植髮醫師不但親自動手做,還發明很多FUE的器械,像是Dr. James Harris , Dr. John Cole ,Dr. Sanusi Umar ,這幾位大師的品質速度相信都不輸機器人,可是一般醫師得勤練FUE好一陣子才能有這等工夫。
即便醫師不怕累,速度品質又勝一籌。可是醫師必須付出自己的體力,或者說是健康。外科手術放大鏡,不管是頭戴式,或是眼鏡式,如果再加上LED光源設備的重量對醫師的頸部脊椎是一大負擔,國內整形外科醫師用牙科的顯微鏡來作植髮,也是因為這台機器有特殊可以幫助醫師保持健康的坐姿,不用低頭斜頸就能夠輕鬆作業,也能常保醫師的頸部健康。
要是託機器人來作業,上述醫師的煩惱也一併解決,只要輕鬆地盯著電視銀幕觀察手術過程即可,而且很多診所還是用40幾吋的大電視銀幕掛在牆上讓醫師可以輕鬆看,不用再當低頭族。
